行星减速机惯量:
行星减速机旋转惯量取决于电机启停时能否控制住电机,也就是说起停时状态是否平稳。行星减速机可将(伺服)电机的旋转惯量放大 ,放大倍数为减速比的平方,比如1比10的减速机 那么惯量就放大100倍。
惯量匹配:(伺服)电机旋转惯量J是电机一个很重要的参数,很多情况下我们发现根据核算电机转速、扭矩都满足要求,但我们选的电机在运行时依然会有问题,这时候就需要关注一下这个旋转惯量J了,不同结构的旋转惯量计算有不同的公式,会在后面慢慢贴上(包括上面提到的转速、扭矩)。这里主要说下是负载旋转惯量在等效到电机轴上时是按传动比平方的倒数倍减小,1/i的平方倍。
1、在解决问题时可先将复杂的问题简单化,然后在从中找出一两个切入点,用现有的理论公式进行演绎推算得出结果,然后对比讨论,探讨所选公式的准确,可靠性,各个参数赋值的依据,列出其他干扰因素,排除次要条件,得出结论。
2、加入边界条件验证结论可靠性,这里我们暂时不去考虑普通三相异步电机,变频电机,伺服电机,直流电机等等的区别。
简单的说我们就是在凑减速比i,让有限的电机型号应用在更广阔的空间,看似这样的话只要我们有不同的速比i,那么只要一台电机就能完成所有工作了,这显然也是不可能的,因为电机还有一个更重要的参数额定功率,到此我们才开始提到。
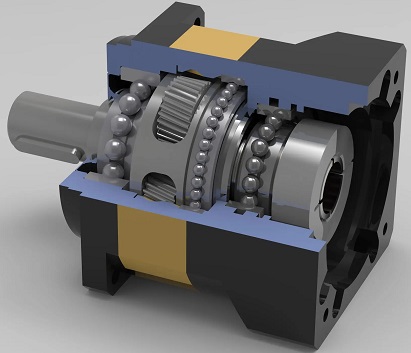
匹配负载旋转惯量:
(伺服)电机的惯量是比较小的,一般来说等效到(伺服)电机轴的负载惯量不能超过伺服电机本身惯量的5倍(不同品牌伺服电机有具体的旋转惯量数据),而实际应用中的负载有很多种,如果负载惯量与电机能匹配的惯量相差太远,就会大大降低伺服电机的响应速度,以至于影响生产效率和增大动态误差。而精密行星减速机就能起到匹配惯量的关键作用。